| 專利名稱 | 一種基于多目標差分進化可變子批的柔性車間調度方法 | ||
|---|---|---|---|
| 申請號/專利號 | CN202410257155.7 | 專利權人(第一權利人) | 長春工業大學 |
| 申請日 | 2024-03-07 | 授權日 | 2024-05-03 |
| 專利類別 | 授權發明 | 戰略新興產業分類 | 新一代信息技術 |
| 技術主題 | 交換|機器|運籌學|工業工程學|差異進化|多目標|最佳調度|企業|甘特圖|生產模型|譯碼方法|空閑時間|完成時間|實時計算 | ||
| 應用領域 | 人造生命 | ||
| 意向價格 | 具體面議 | ||
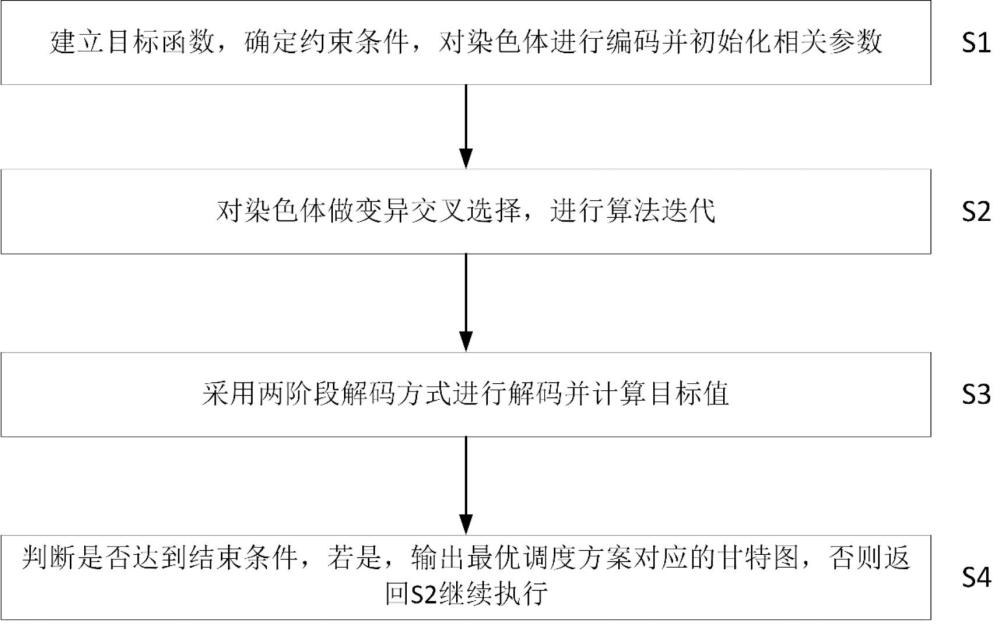
| 專利概述 | 本發明公開了一種基于多目標差分進化可變子批的柔性車間調度方法,包括:S1:建立目標函數,確定約束條件,對染色體進行編碼并初始化相關參數;S2:對染色體做變異交叉選擇,進行算法迭代;S3:采用兩階段解碼方式進行解碼并計算目標值;S4:判斷是否達到結束條件,若是,輸出最優調度方案對應的甘特圖,否則返回S2繼續執行。本發明采用可變子批進行工件的批量拆分,并設計了兩階段解碼方式,將四維問題降到三維問題,縮小了解集空間,有效的提升了求解質量;同時結合企業實際生產,采用批次流設計,同時考慮了成本和完工時間,在成本計算中,同時考慮了不同機器空閑時長的代價和不同機器加工相同工件的成本,更貼合實際生產模型。 | ||
| 圖片資料 |
|
||
| 合作方式 | 擬許可 | ||
| 聯系人 | 戚梅宇 | 聯系電話 | 13074363281 |