| 專利名稱 | 壓電驅動微定位平臺的無抖振滑模控制方法 | ||
|---|---|---|---|
| 申請號/專利號 | CN202010454454.1 | 專利權人(第一權利人) | 吉林大學 |
| 申請日 | 2020-05-26 | 授權日 | 2023-02-03 |
| 專利類別 | 授權發明 | 戰略新興產業分類 | 雙五星 |
| 技術主題 | 機械工程|控制工程|預測算法|控制信號|運動控制|粒子群優化|滑動模式控制|系統建模|動作控制 | ||
| 應用領域 | 數字控制 | ||
| 意向價格 | 具體面議 | ||
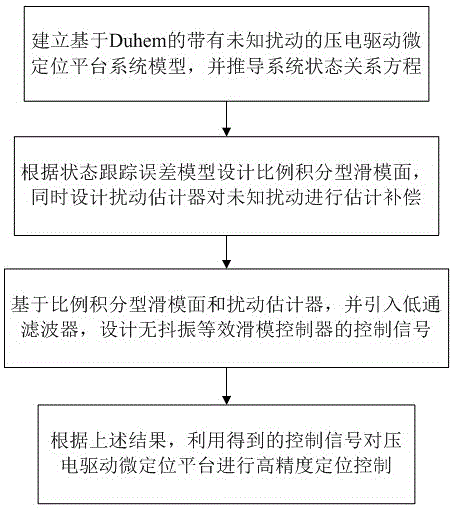
| 專利概述 | 一種壓電驅動微定位平臺的無抖振滑模控制方法,屬于精密運動控制領域。本發明的目的是采用基于粒子群的約束廣義預測算法實現平臺精密定位控制的壓電驅動微定位平臺的無抖振滑模控制方法。本發明的步驟是:建立基于Duhem的帶有未知擾動的壓電驅動微定位平臺系統模型,并且根據其系統模型推導出壓電驅動微定位平臺系統狀態關系方程;設計基于擾動估計器的無抖振等效滑模控制器,得到控制信號,并且控制壓電驅動微定位平臺系統狀態關系方程,從而實現對壓電驅動微定位平臺的高精度定位控制。本發明用粒子群優化算法代替廣義預測控制中的滾動優化過程對輸入約束與輸入變化率約束進行處理,實現壓電陶瓷微定位平臺的精密定位控制,可擴展到更多優化問題的求解,解決更多領域的問題。 | ||
| 圖片資料 |
|
||
| 合作方式 | 擬許可;擬轉讓 | ||
| 聯系人 | 戚梅宇 | 聯系電話 | 13074363281 |