| 專利名稱 | 考慮約束條件的壓電陶瓷微定位平臺軌跡跟蹤控制方法 | ||
|---|---|---|---|
| 申請號/專利號 | CN202010481100.6 | 專利權人(第一權利人) | 吉林大學 |
| 申請日 | 2020-05-31 | 授權日 | 2022-09-27 |
| 專利類別 | 授權發明 | 戰略新興產業分類 | 雙五星 |
| 技術主題 | 機械工程|控制工程|預測控制器|位置控制|系統穩定性|粒子群優化|控制算法|定位系統|動作控制 | ||
| 應用領域 | 自適應控制 | ||
| 意向價格 | 具體面議 | ||
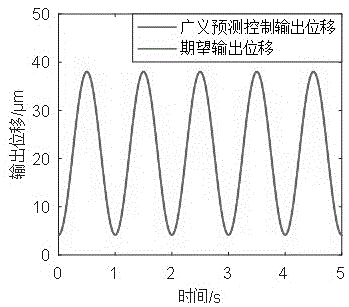
| 專利概述 | 一種考慮約束條件的壓電陶瓷微定位平臺軌跡跟蹤控制方法,屬于精密運動控制領域。本發明的目的是采用一種廣義預測控制補償遲滯特性對于壓電陶瓷微定位平臺在精確定位中的影響。本發明首先建立能夠描述壓電陶瓷微定位平臺特性的約束模型,由遲滯部分和線性部分構成;然后構建約束廣義預測控制器框架,利用預測模型獲得壓電定位系統的預測未來時刻輸出值;并利用粒子群優化算法代替傳統廣義預測控制算法中的滾動優化過程,之后按照粒子群優化算法的位置與速度更新方式進行粒子尋優直到達到最大迭代次數;最后得到壓電定位系統當前時刻控制量,并且證明系統穩定性。本發明能夠滿足系統約束條件并減少遲滯特性對壓電陶瓷微定位平臺定位控制的不良影響,實現精密軌跡跟蹤控制。 | ||
| 圖片資料 |
|
||
| 合作方式 | 擬許可 | ||
| 聯系人 | 戚梅宇 | 聯系電話 | 13074363281 |