| 專利名稱 | 基于經穴療法的四自由度繞神闕穴揉腹運動仿生機械手 | ||
|---|---|---|---|
| 申請號/專利號 | CN202110438736.7 | 專利權人(第一權利人) | 吉林大學 |
| 申請日 | 2021-04-23 | 授權日 | 2024-05-10 |
| 專利類別 | 授權發明 | 戰略新興產業分類 | 雙五星 |
| 技術主題 | 按摩|物理治療|機械手|康復醫學 | ||
| 應用領域 | 壓迫反射點的儀器|振動按摩|治療處理用的冷卻器具|治療處理用的加熱器具 | ||
| 意向價格 | 具體面議 | ||
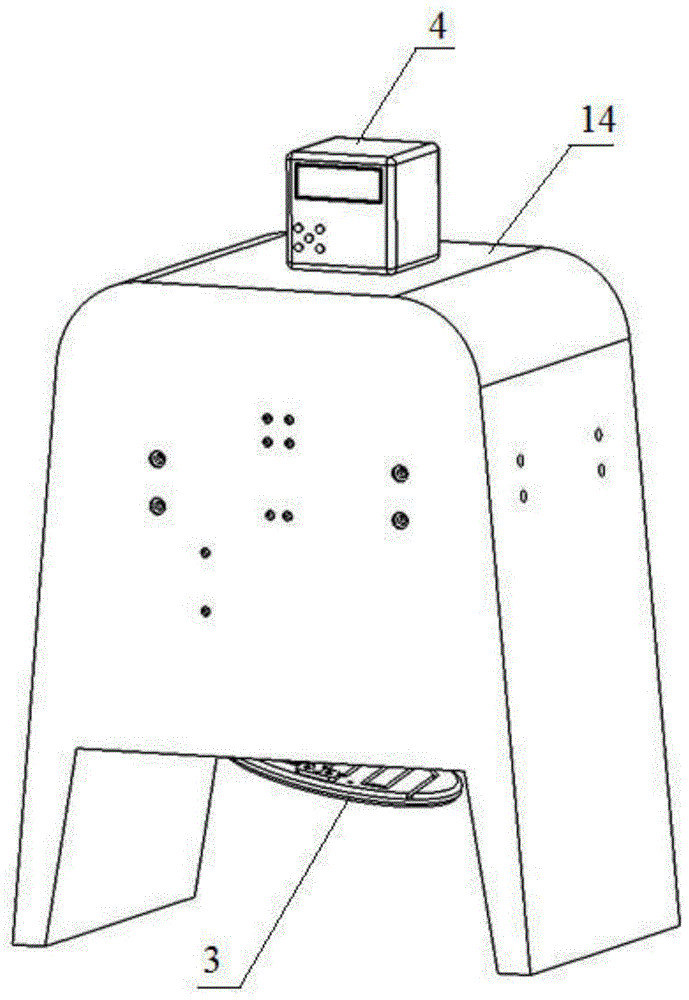
| 專利概述 | 本發明公開了一種基于經穴療法的四自由度繞神闕穴揉腹運動仿生機械手,包括有滑臺、定位架、按摩振動板和控制器,其中滑臺裝配在定位架中心的安裝口內,滑臺內螺接有第一螺桿和第二螺桿,第一螺桿和第二螺桿上下交錯呈垂直方向螺接在滑臺內,定位架的左右兩側的側壁上對稱開設有第一滑槽,第一螺桿的兩端分別樞接在定位架左右兩側的第一滑槽內,定位架的前后兩側的側壁上對稱開設有第二滑槽,第二螺桿的兩端分別樞接在定位架前后兩側的第二滑槽內;有益效果:規避了人為操作時可能產生的疲勞而降低揉腹手法的頻數和力度的問題,確保動作的精度和速度。 | ||
| 圖片資料 |
|
||
| 合作方式 | 擬許可;擬轉讓 | ||
| 聯系人 | 戚梅宇 | 聯系電話 | 13074363281 |