| 專利名稱 | 融合駕駛模式信息的汽車預測巡航參數自整定控制系統 | ||
|---|---|---|---|
| 申請號/專利號 | CN202110563042.6 | 專利權人(第一權利人) | 吉林大學 |
| 申請日 | 2021-05-24 | 授權日 | 2022-04-01 |
| 專利類別 | 授權發明 | 戰略新興產業分類 | 雙五星 |
| 技術主題 | 控制系統|計算機科學|自整定|駕駛模式|可靠性工程|多目標優化|車輛駕駛|控制器設計|貝葉斯優化|智能網|信息獲取|汽車駕駛 | ||
| 應用領域 | 控制裝置 | ||
| 意向價格 | 具體面議 | ||
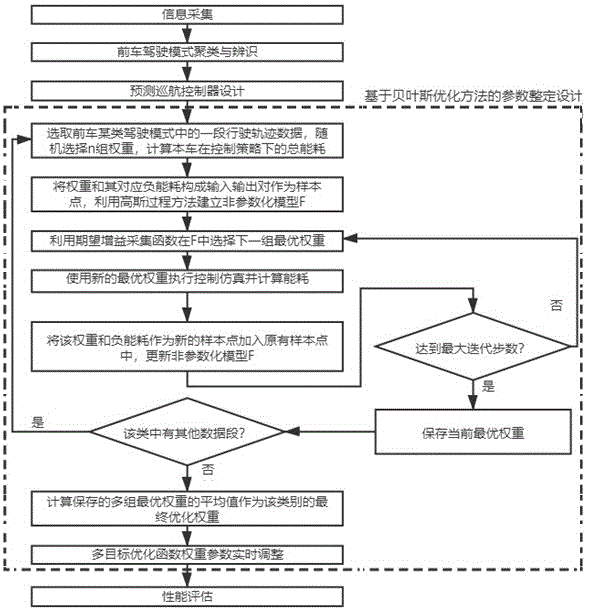
| 專利概述 | 一種考融合駕駛模式辨識信息的網聯汽車預測巡航參數自整定控制系統,屬于智能網聯汽車節能控制領域。本發明的目的是通過數據挖掘的手段對車輛駕駛模式進行辨識,提升車輛燃油經濟性的同時大幅降低了多目標優化控制權重整定工作量的融合駕駛模式信息的汽車預測巡航參數自整定控制系統。本發明步驟是:信息采集、前車駕駛模式聚類與辨識、預測巡航控制器設計、基于貝葉斯優化方法的參數整定設計。本發明能夠快速準確地求出一組最優權重參數,這有效避免了人為選擇權重時所需要的大量試錯,大幅減少權重參數調整的人力,并在一定程度上改善駕駛舒適度和跟蹤性能。 | ||
| 圖片資料 |
|
||
| 合作方式 | 具體面議 | ||
| 聯系人 | 戚梅宇 | 聯系電話 | 13074363281 |