| 專利名稱 | 一種基于局部點對特征的物體三維點云配準算法 | ||
|---|---|---|---|
| 申請號/專利號 | CN202111069102.5 | 專利權人(第一權利人) | 長春工業大學 |
| 申請日 | 2021-09-13 | 授權日 | 2023-05-12 |
| 專利類別 | 授權發明 | 戰略新興產業分類 | 高端裝備制造 |
| 技術主題 | 點云|功能描述|基于對象|特征矩陣|點對|算法|特征匹配 | ||
| 應用領域 | 圖像數據處理 | ||
| 意向價格 | 具體面議 | ||
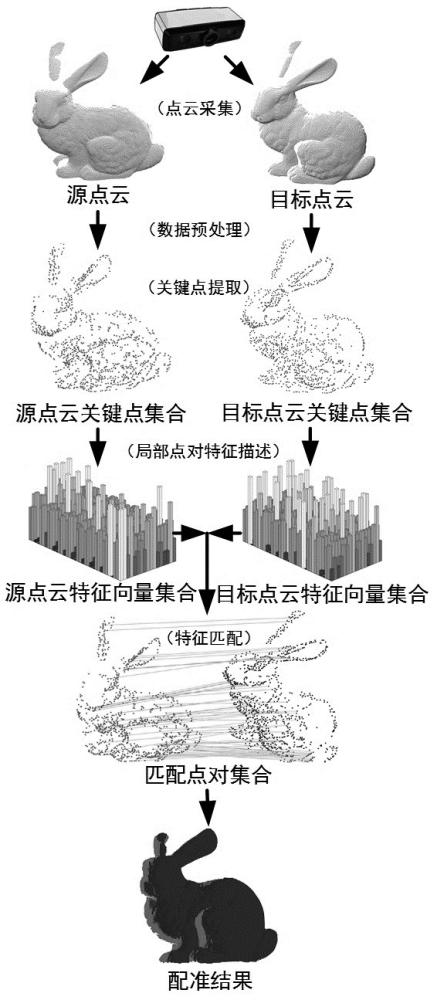
| 專利概述 | 本發明公開了一種基于局部點對特征的物體三維點云配準算法,具體按照以下步驟實施:步驟1,通過深度相機獲取物體多個不同角度的三維點云數據;步驟2,對步驟1得到的點云數據進行預處理;步驟3,對步驟2得到的點云進行關鍵點提取,得到物體表面較為突出或凹陷的點集;步驟4,利用局部點對特征對步驟3得到關鍵點集進行特征描述,獲得特征描述矩陣;步驟5,對步驟4得到的特征矩陣進行特征匹配,利用匹配到的點對關系計算旋轉平移矩陣;步驟6,利用步驟5得到的旋轉平移矩陣將物體的多個不同角度的點云旋轉平移至同一坐標系下,完成配準。這種基于局部點對特征的物體三維點云配準算法具有魯棒性強、配準精度高和運行速度快的優點。 | ||
| 圖片資料 |
|
||
| 合作方式 | 擬轉讓 | ||
| 聯系人 | 戚梅宇 | 聯系電話 | 13074363281 |