99久久综合国产精品二区-99久热-国产激情久久-国产激情久久久-久草精品在线观看-久草久-欧美精品系列-欧美精品小视频-色444-色5566-亚洲精品推荐-亚洲精品网站在线播放gif-亚洲欧美国产国产一区二区三区-小泽玛利亚一区二区在线-狠狠亚洲婷婷综合色香五月排名-精品四虎国产在免费观看
<bdo id="kkqmy"></bdo>
<button id="kkqmy"><input id="kkqmy"></input></button>
<strike id="kkqmy"></strike>
<code id="kkqmy"></code>
2025年12月20日 星期六
中國科學院
辦公系統
網站地圖
新聞中心
聯系我們
English
注冊
/
登錄
熱搜詞:中科院
技術需求
創新服務
首頁
共同體
企業概況
更多 >
為深入貫徹《促進科技成果轉化法》,加快長吉圖國家科技成果轉移轉化示范區建設,集聚科技創新資源要素,促進科技成果轉移轉化,探索吉林科技成果轉移轉化模式與路徑,服務吉林科技企業高質量發展,支撐吉林實現全面振興、全方位振興,在吉林省科技廳、長春新區管委會的業務指導下,吉林省科技成果轉移轉化共同體(以下簡稱“共同體”)于2019年9月12日正式揭牌啟動。
人物志
更多 >
會員單位
更多 >
長春北湖科技園發展有限責任公司
吉林大學
加入我們
企業概況
會員單位
人物志
加入我們
光電聯盟
儀器管理
更多 >
企業管理
更多 >
平臺展示
企業概況
更多 >
為全面深化吉林省與中國科學院合作,推動中國科學院的科技創新優勢與吉林振興發展對接,中國科學院的創造與吉林制造對接,中國科學院創新創業資源與吉林優質營商環境對接,提升吉林省支柱產業和優勢產業的科技競爭力,使戰略新興產業得到跨越式發展,2019年9月12日,中科吉林科技產業創新平臺在長春北湖科技園落成。
總經理致辭
更多 >
李冰
|
總經理
吉林省國科創新孵化投資有限公司是中科吉林科技產業創新平臺的運營單位,是吉林省科技成果轉移轉化共同體的副理事長單位以及秘書處單位。以及秘書處單位。 2019 年 6 月 18 日,吉林省國科創新孵化投資有限公司(以下簡稱“吉林國科創新”)在長春新區成立。吉林國科創新依托中科院科研成果積累、高端人才儲備和產業資源優勢,秉持“人才聚集、技術引領、創新賦能、產業提升、資本加速”理念,以“集聚-引領-創新”為目標,積極貫徹落實國科控股聯動創新綱要,憑借中國科學院優勢科技資源和吉林省的特色產業資源,持續探索“政產學研金介用”協同創新機制,通過“創新鏈、產業鏈、資本鏈”三鏈聯動,以“基金+基地”的雙輪驅動模式設立運營中科吉林科技產業創新平臺,充分發揮科技服務產業的作用,開展企業孵化、人才培養、雙創培訓、基金投資等專業化、一站式創新業務。
重大活動新聞
更多 >
2018年
《Nature Publishing index》2018全球科研機構排名位列第一(連續7年第一)
2019年
2019年2月21日,簽署了《吉林省人民政府中國科學院關于推動吉林省打造新動能實現高質量發展的合作協議》。
企業概況
總經理致辭
重大新聞活動
技術轉移
成果展示
更多 >
人血清sST2蛋白的ELISA檢測試劑盒
sST2蛋白是一種新型的心血管疾病標志物,可以用來監測心血管疾病進程及預后狀況。
利用部分雙鏈線性 DNA 探針檢測丙型肝炎病毒 RNA 的新型實時逆轉錄-聚合酶鏈反應
該新型實時逆轉錄-聚合酶鏈式反應可以覆蓋多種亞型HCV病毒RNA的檢測,具有廣闊的應用前景。 部分雙鏈線性DNA探針提高了檢測靈敏度。
技術需求
項目路演
更多 >
100公斤推力等級低成本高性能微型渦噴發動機研制
100公斤推力等級低成本高性能微型渦噴發動機在高空高速靶機、短射程巡航彈、高空察打一體無人機、高空高速戰術無人機中得到了廣泛的應用。鑒于渦噴發動機的技術先進性及其對國防建設的重要性,美國及歐洲將50公斤以上中小推力渦噴發動機也列為對我國嚴格限制的關鍵技術之一。由于技術門檻較高,目前國內在100公斤推力等級上的渦噴發動機還是空白,但需求卻非常迫切。
中科院科技成果路演 企業挑選科技成果
專利超市
技術需求
成果展示
項目路演
創新服務
基礎服務
更多 >
工商注冊
財權代辦
人力資源
成長服務
更多 >
政策輔導
商務接洽
知識產權
創業培訓
企業創新成長陪伴服務
更多 >
企業診斷
導師輔導
企業管理咨詢報告
戰略咨詢
技術服務
人才交流與培養
金融服務
渠道拓展/品牌提升
基礎服務
成長服務
企業創新成長陪伴服務
專家智庫
專家展示
更多 >
唐沛
中科院創業投資管理有限公司投資總監
工作單位:吉林省中科創業投資管理有限公司
個人簡介:中科院創業投資管理有限公司投資總監,中國母基金行業30位30歲以下杰出投資人(金匯獎)、投資的項目連續兩次榮獲融資中國中國節能環保產業十佳投資案例(2018年、2019年)。
李海永
深圳市創新投資集團有限公司東北區域負責人
工作單位:深圳市創新投資集團有限公司
個人簡介:深圳市創新投資集團有限公司東北區域負責人,獲得“2016中國最佳青年投資人”,“2017中國最佳青年投資人”稱號。
輔導效果
更多 >
助力軌道客車領域裝備國產化及技術改革
“9+6+N”多功能服務模式為初創企業發展打下堅實基礎
專家展示
輔導效果
金融投資
基金分類
更多 >
吉林中科天使創業投資基金
吉林中科科技成果轉化創業投資基金
吉林中科先導投資基金
投融資需求
更多 >
延吉美教軟件開發有限公司
吉林省北國之春農業科技開發有限公司
吉林省北國之春農業科技開發有限公司
線下對接
基金分類
投融資需求
線下對接
資源庫
會員中心
相關下載
高新技術企業認定相關材料
技術合同認定登記相關資料
科技成果登記辦理流程
吉林省科技發展計劃2019年度項目指南
吉林省科技發展計劃2021年度項目指南
吉林省科技發展計劃2020 年度項目指南
基金申請材料
專利超市
Patent Supermarket
>>
當前位置
-
網站首頁
-
專利超市
專利超市
產業分類:
全部
材料化工
高端裝備制造
生物醫藥
新一代信息技術
雙五星
專利權人:
全部
長春理工大學
長春工業大學
吉林建筑大學
中國科學院東北地理與農業生態研究所
中國科學院東北地理與農業生態研究所農業技術中心
吉林醫藥學院
東北電力大學
延邊大學
吉林大學
東北師范大學
吉林農業大學
吉林化工大學
長春工程學院
吉林大學第一醫院
吉林市農業科學院(吉林市農產品質量監督檢驗中心)
北華大學
長春中醫藥大學
中國農業科學院特產研究所
長春大學
吉林工程技術師范學院
吉林省養蜂科學研究所
吉林建筑科技學院
白城師范學院
吉林體育學院
長春光華學院
吉林農業科技學院
吉林工商學院
長春電子科技學院
吉林鐵道職業技術大學
吉林省蠶業科學研究院(吉林省農特產品研究院吉林省北冬蟲夏草研究中心)
吉林師范大學
吉林省石油化工設計研究院
通化師范學院
吉林省林業科學研究院(吉林省林業生物防治中心站)
專利類別:
全部
授權發明
實用新型
合作方式:
全部
擬轉讓
擬許可
擬許可;擬轉讓
面議
具體面議
綜合排序
雙五星
壓電驅動微定位平臺的無抖振滑模控制方法
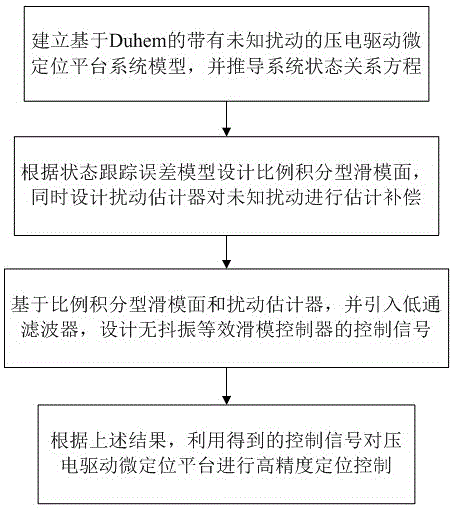
一種壓電驅動微定位平臺的無抖振滑模控制方法,屬于精密運動控制領域。本發明的目的是采用基于粒子群的約束廣義預測算法實現平臺精密定位控制的壓電驅動微定位平臺的無抖振滑模控制方法。本發明的步驟是:建立基于Duhem的帶有未知擾動的壓電驅動微定位平臺系統模型,并且根據其系統模型推導出壓電驅動微定位平臺系統狀態關系方程;設計基于擾動估計器的無抖振等效滑模控制器,得到控制信號,并且控制壓電驅動微定位平臺系統狀態關系方程,從而實現對壓電驅動微定位平臺的高精度定位控制。本發明用粒子群優化算法代替廣義預測控制中的滾動優化過程對輸入約束與輸入變化率約束進行處理,實現壓電陶瓷微定位平臺的精密定位控制,可擴展到更多優化問題的求解,解決更多領域的問題。
吉林大學
授權發明
雙五星
考慮約束條件的壓電陶瓷微定位平臺軌跡跟蹤控制方法
一種考慮約束條件的壓電陶瓷微定位平臺軌跡跟蹤控制方法,屬于精密運動控制領域。本發明的目的是采用一種廣義預測控制補償遲滯特性對于壓電陶瓷微定位平臺在精確定位中的影響。本發明首先建立能夠描述壓電陶瓷微定位平臺特性的約束模型,由遲滯部分和線性部分構成;然后構建約束廣義預測控制器框架,利用預測模型獲得壓電定位系統的預測未來時刻輸出值;并利用粒子群優化算法代替傳統廣義預測控制算法中的滾動優化過程,之后按照粒子群優化算法的位置與速度更新方式進行粒子尋優直到達到最大迭代次數;最后得到壓電定位系統當前時刻控制量,并且證明系統穩定性。本發明能夠滿足系統約束條件并減少遲滯特性對壓電陶瓷微定位平臺定位控制的不良影響,實現精密軌跡跟蹤控制。
吉林大學
授權發明
雙五星
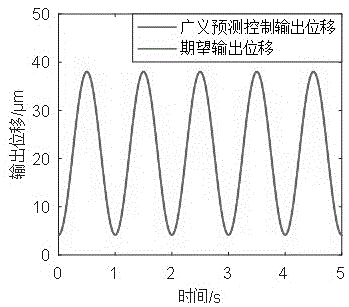
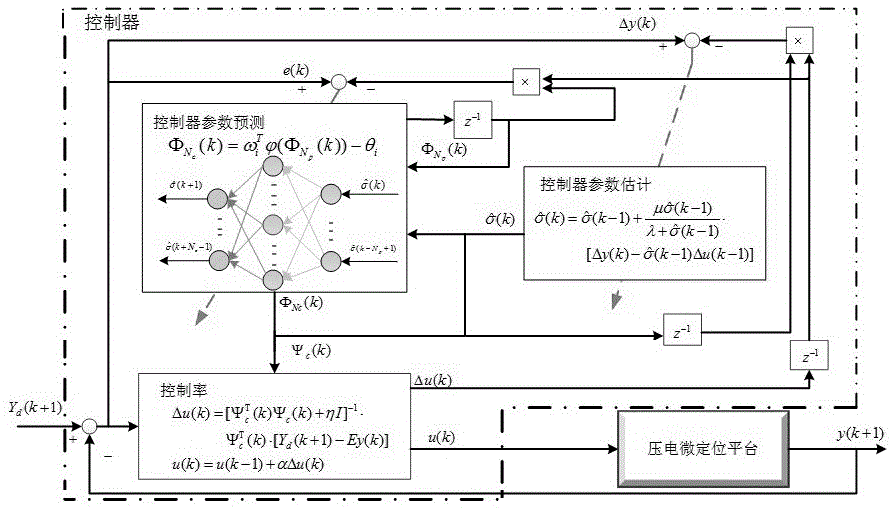
基于數據驅動控制的壓電微定位平臺軌跡跟蹤控制方法
一種基于數據驅動控制的壓電微定位平臺軌跡跟蹤控制方法,屬于微納控制技術領域。本發明的目的是采用緊格式動態線性化方法對建立的非線性模型進行轉化為基于輸入輸出數據增量形式的數據模型,并通過最小化壓電微定位平臺系統誤差和控制量變化率準則函數求取控制率的基于數據驅動控制的壓電微定位平臺軌跡跟蹤控制方法。本發明步驟是:設計基于數據驅動控制的壓電微定位平臺軌跡跟蹤控制器,在不依賴壓電微定位平臺系統物理參數和數學模型的情況下,引入改進投影算法和神經網絡分別估算和預測基于實際輸入輸出數據的控制器參數。本發明解決了現有基于模型的控制器性能對模型結構和建模精度的依賴,僅基于系統輸入輸出數據實現壓電微定位平臺系統高精度軌跡跟蹤控制。
吉林大學
授權發明
雙五星
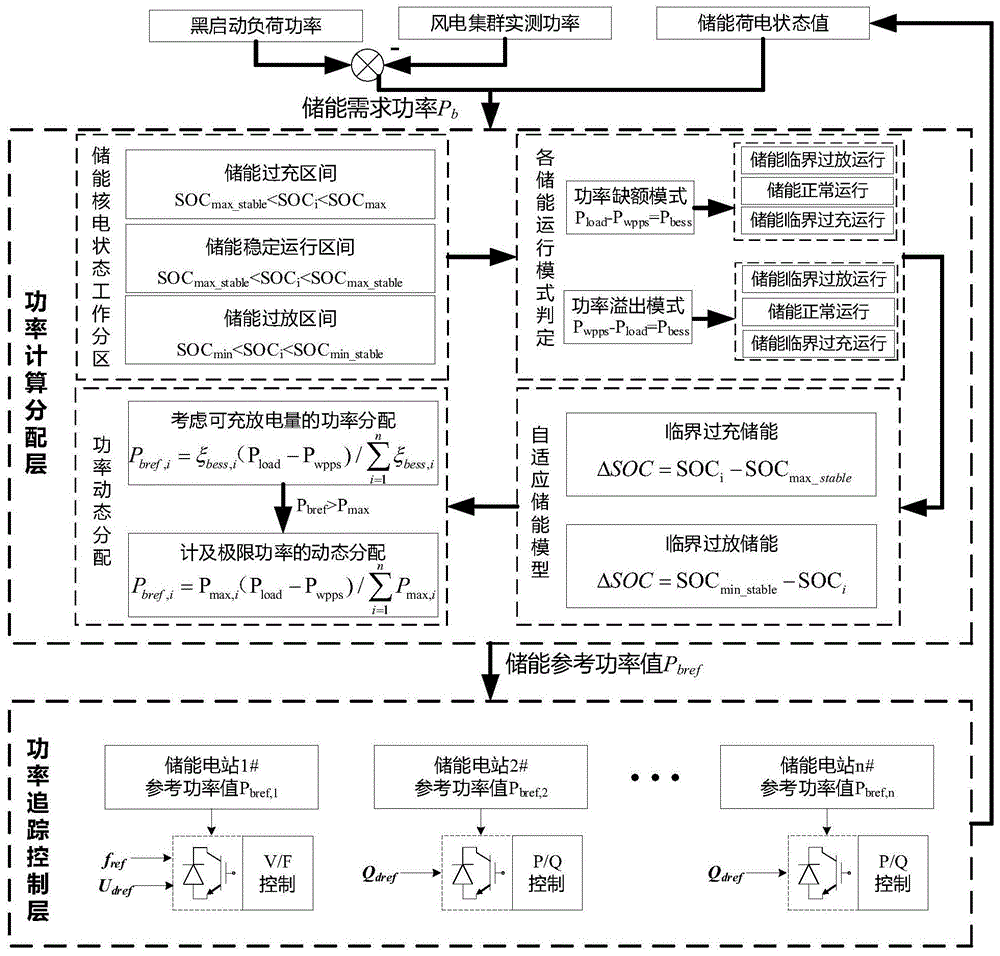
一種基于功率動態分配的多儲能支撐黑啟動協調控制方法
本發明的一種基于功率動態分配的多儲能支撐黑啟動協調控制方法,其包括:功率計算分配層的控制方案、功率追蹤控制層的控制方案,功率計算分配層的控制方案通過建立儲能荷電狀態工作分區,將儲能系統劃分為24種工作模式,針對不同模式采用相適宜的控制方法,可以有效解決分散獨立控制的風儲系統難以保證黑啟動穩定運行問題;功率追蹤控制層的控制方案中V/f和PQ相結合,根據上層計算功率指令進行工作,并將儲能實時荷電狀態反饋到功率計算分配層中。其方法科學合理,適用性強,效果佳。
東北電力大學
授權發明
雙五星
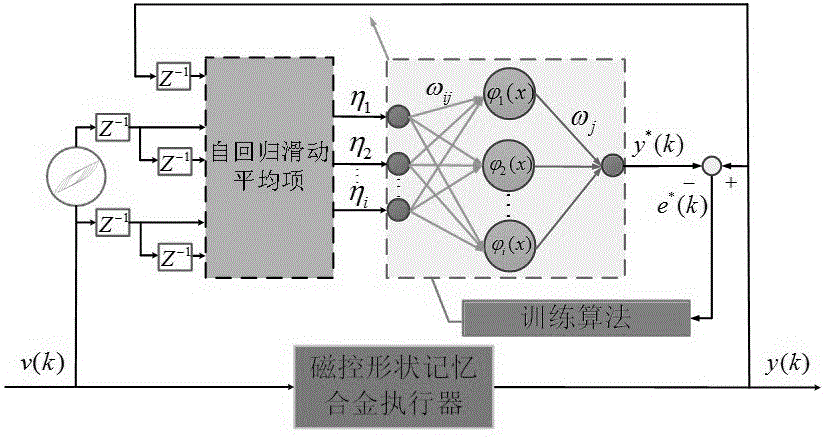
磁控形狀記憶合金執行器的多模型聯合建模方法
一種磁控形狀記憶合金執行器的多模型聯合建模方法,屬于控制技術領域。本發明的目的是構建NARMAX結構模型,既可以提高NARMAX模型描述多值映射遲滯的能力,同時也使得Bouc?wen模型描述高度不對稱的遲滯成為可能的磁控形狀記憶合金執行器的多模型聯合建模方法。本發明步驟是:建立可以描述磁控形狀記憶合金執行器多值映射遲滯的NARMAX結構模型;利用小波神經網絡構建NARMAX結構模型的未知非線性函數,建立能夠在線更新模型參數適應磁控形狀記憶合金執行器復雜動態遲滯特性的NARMAX結構模型。本發明有效地推動智能材料執行機構在高精尖制造產業中的應用,可以在線調整模型參數適應磁控形狀記憶合金執行器復雜的動態遲滯特性。
吉林大學
授權發明
雙五星
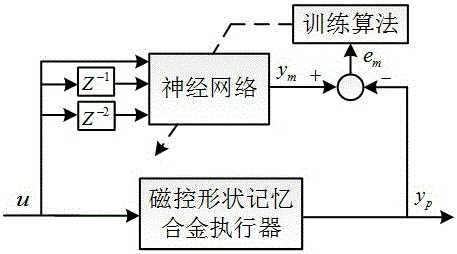
磁控形狀記憶合金執行器位移控制方法
一種磁控形狀記憶合金執行器位移控制方法,屬于智能材料及其機構建模與控制領域。本發明的目的是將神經網絡與迭代學習控制相結合,設計了基于神經網絡的迭代學習控制器,并給出系統初始狀態在有界范圍內變化時系統收斂條件的磁控形狀記憶合金執行器位移控制方法。本發明步驟是:建立可以描述磁控形狀記憶合金執行器率相關遲滯非線性的Volterra級數模型,并利用神經網絡構建Volterra級數的核函數;采用神經網絡擬合迭代學習控制器,并給出系統初始狀態在有界范圍內變化時系統的收斂條件。本發明不但放寬了迭代學習控制的適用條件,更符合實際應用環境,還提高了迭代學習控制的魯棒性,提升控制品質。
吉林大學
授權發明
上一頁
1
2
...
31
32
33
34
35
...
123
124
下一頁
99久久综合国产精品二区-99久热-国产激情久久-国产激情久久久-久草精品在线观看-久草久-欧美精品系列-欧美精品小视频-色444-色5566-亚洲精品推荐-亚洲精品网站在线播放gif-亚洲欧美国产国产一区二区三区-小泽玛利亚一区二区在线-狠狠亚洲婷婷综合色香五月排名-精品四虎国产在免费观看
<abbr id="yusqq"><source id="yusqq"></source></abbr>
<cite id="yusqq"></cite>
<li id="yusqq"></li>
<strike id="yusqq"><acronym id="yusqq"></acronym></strike>
主站蜘蛛池模板:
亚洲乱码国产乱码精品精
|
欧美高清无遮挡
|
自拍偷拍亚洲在线
|
国产一区二区三区在线免费观看
|
亚洲视频精品在线
|
www.日本久久久久com.
|
久久久国产精彩视频美女艺术照福利
|
日日摸夜夜添一区
|
麻豆乱码国产一区二区三区
|
欧美性xxxx18
|
午夜精品久久久久久99热
|
欧美激情aaaa
|
国产精品91久久
|
亚洲xxx视频
|
在线精品高清中文字幕
|
久久久精品亚洲
|
91精品国产色综合久久不卡98口
|
日本最新高清不卡中文字幕
|
成人看片人aa
|
中文字幕av日韩
|
欧美性xxxx在线播放
|
国产精品高潮呻吟久久av无限
|
91麻豆桃色免费看
|
中文字幕日韩有码
|
欧美激情喷水视频
|
成人欧美一区二区三区黑人
|
亚洲色图在线观看
|
久久91精品国产91久久跳
|
欧美亚洲在线观看
|
91在线视频导航
|
久久久精品国产亚洲
|
日本成人黄色片
|
亚洲欧美精品一区
|
久久久久久尹人网香蕉
|
成人a免费视频
|
欧美成人免费小视频
|
日本欧美在线视频
|
一区二区国产精品视频
|
97精品国产97久久久久久
|
日韩久久午夜影院
|
欧美疯狂做受xxxx高潮
|